안녕하세요. 오늘은 기존의 GAN에서 변형을 준 논문 중 하나인 Wasserstein GAN (WGAN)에 대해서 다뤄보려고 합니다.
논문 주소: arxiv.org/abs/1701.07875
Wasserstein GAN
We introduce a new algorithm named WGAN, an alternative to traditional GAN training. In this new model, we show that we can improve the stability of learning, get rid of problems like mode collapse, and provide meaningful learning curves useful for debuggi
arxiv.org
다소 수학적인 내용들을 많이 포함하고 있어, 다음 슬라이드 자료들을 참고했습니다.
www.slideshare.net/ssuser7e10e4/wasserstein-gan-i
Wasserstein GAN 수학 이해하기 I
이 슬라이드는 Martin Arjovsky, Soumith Chintala, Léon Bottou 의 Wasserstein GAN (https://arxiv.org/abs/1701.07875v2) 논문 중 Example 1 을 해설하는 자료입니다
www.slideshare.net
그럼 시작해보겠습니다.
1. Introduction
본 연구에서 관심을 가지는 문제는 비지도 학습이다.
대부분, 확률 분포를 학습한다는 것이 무엇을 의미할까?
이에 대한 고전적인 정답은 확률 밀도를 학습하는 것이다.
이는 종종 밀도의 parametric family $(P_\theta)_{\theta \in R^d}$을 정의함으로써 이루어지며, 우리 데이터에 대한 likelihood를 최대화하는 parameter를 찾게 된다.
(제 생각에는 이 $P_\theta$라는 것은 어떤 분포의 parameter 일 수도 있고, 아니면 neural network의 가중치가 될 수도 있는 것 같습니다. 정규분포라고 한다면 평균과 표준편차가 parameter가 되겠죠. 그래서 parametric family라는 용어를 사용한 것이 아닐까라는 생각이 듭니다.)
즉, 만약 우리가 실제 데이터 $\left\{x^{(i)}\right\}^m_{i=1}$를 가지고 있을 때, 우리는 다음 문제를 해결하는 것이다.

만약 실제 데이터 분포 $\mathcal{P}_r$가 밀도를 나타내고, $\mathcal{P}_\theta$가 parametrized density $P_\theta$의 분포라면, 점근적으로, 이 양은 KL divergence $KL(\mathcal{P}_r \parallel \mathcal{P}_\theta)$를 최소화한다. (즉, 실제 데이터 분포와 parameter로 나타내지는 밀도 사이의 거리를 최소화해서 parameter로 실제 데이터 분포에 가깝게 만들어보자는 의미입니다.)
이것이 타당하기 위해서, 우리는 model density $P_\theta$가 존재할 필요가 있다.
하지만, 이는 저차원 manifold에 의해서 지지를 받는 분포를 다루는 일반적인 상황에서는 그렇지 않다.
model manifold와 실제 분포의 support가 무시할 수 없는 교차점을 가질 가능성은 거의 없으며, 이는 KL distance가 정의되지 않는다는 것을 의미한다. (혹은 단순히 무한하다.)
(support라는 개념은 한국어로는 지지집합이라는 개념인데, 어떤 함수가 존재할 때 함숫값이 0이 되는 정의역의 집합을 의미합니다. 예를 들어서, 함수가 f(x) = x + 1이라면, 지지 집합은 x = -1이 될 것입니다.)
전형적인 해결책은 model distribution에 noise term을 추가하는 것이다.
이것은 고전적인 머신러닝 문헌에서 묘사되는 사실상 모든 생성 모델들이 noise component를 포함하는 이유이다.
가장 간단한 경우에, 모든 예시들을 커버하기 위해 상대적으로 높은 대역폭을 가지는 Gaussian noise를 가정한다.
예를 들어, 이미지 생성 모델의 경우에, 이 noise는 샘플의 품질을 저하시키고 뿌옇게 만든다는 사실은 잘 알려져 있다.
예를 들어, 최근 논문 [23]에서 likelihood를 최대화할 때 모델에 더해지는 noise의 최적의 standard deviation은 생성된 이미지에서 각 픽셀에 약 0.1이며, 이때 픽셀은 이미 정규화되어 [0, 1] 범위 안에 들어간 상태이다.
이는 매우 높은 양의 noise이며, 따라서 논문에서 모델의 샘플을 나타낼 때, 그들은 likelihood number를 보고하는 noise term을 추가하지 않는다.
즉, 추가된 noise term은 문제에 대해서 명백하게 부정확하지만, maximum likelihood approach가 작동하도록 하기 위해 필요하다.
아마도 존재하지 않는 $\mathcal{P}_r$의 밀도를 추정하는 것 대신에, fixed distribution $p(z)$를 가지는 random variable $Z$를 정의할 수 있으며 이를 어떤 분포 $\mathcal{P}_\theta$를 따르는 샘플을 직접적으로 만드는 parametric function $g_\theta : Z \rightarrow X$ (전형적으로 어떤 종류의 신경망)에 통과시킨다.
$\theta$를 다르게 하면서, 우리는 이 분포를 변화시킬 수 있고 실제 데이터 분포 $\mathcal{P}_r$에 가깝게 만들 수 있다.
이는 두 가지 측면에서 유용하다.
첫 번째로, 밀도와는 다르게, 이 접근법은 저차원의 manifold에 국한된 분포를 표현할 수 있다.
두 번째로, 쉽게 샘플을 생성할 수 있는 능력은 밀도의 값을 아는 것보다 더욱 유용하다. (예를 들어, 이미지 super-resolution이나 semantic segmentation에서 input image가 주어졌을 때의 output image의 조건부 분포를 고려할 때)
일반적으로, 임의의 고차원 밀도가 주어졌을 때 샘플을 생성하는 것은 연산적으로 어렵다.
Variational Auto-Encoders (VAEs)와 Generative Adversarial Networks (GANs)는 이러한 접근법으로 잘 알려져 있다.
왜냐하면 VAE는 examples의 approximate likelihood에 초점을 두기 때문에, 표준 모델의 한계점을 공유하며 추가적인 noise terms을 조작할 필요가 있다.
GANs는 목적 함수의 정의에서 훨씬 더 많은 융통성을 제공하며, Jensen-Shannon과 모든 f-divergence, exotic combinations를 포함한다.
반면에, GANs를 학습시키는 것은 [1]에서 이론적으로 연구된 이유로 인해 까다롭고 불안정한 것으로 잘 알려져 있다.
본 논문에서는 거리나 분산 $\rho(\mathcal{P}_\theta, \mathcal{P}_r)$를 정의하는 다양한 방법에 대해 모델 분포와 실제 분포가 얼마나 가까운지를 측정하는 다양한 방법에 관심을 가진다.
이러한 distance 사이의 가장 근본적인 차이는 확률 분포의 sequence의 convergence에 미치는 영향이다.
분포의 sequence $(\mathcal{P}_t)_{t \in N}$는 $\rho(\mathcal{P}_t, \mathcal{P}_\infty)$가 0이 되는 경향이 있는 분포 $\mathcal{P}_\infty$가 존재할 때 수렴하게 되며 이는 distance $\rho$가 얼마나 정확히 정의되는지에 달려있다.
비공식적으로, distance $\rho$는 이것이 distribution의 sequence가 수렴하기 더 쉽도록 만들 때 weaker topology를 유발한다.
Section 2는 인기있는 확률 거리가 이 점에서 얼마나 다른지 명확히 한다.
Parameter $\theta$를 최적화하기 위해서, 물론 mapping $\theta \mapsto \mathcal{P}_\theta$를 연속적으로 만드는 방식으로 우리의 모델 분포 $\mathcal{P}_\theta$를 정의하는 것이 바람직하다.
연속성은 parameter의 sequence인 $\theta_t$가 $\theta$에 수렴할 때, distributions $\mathcal{P}_{\theta_t}$ 또한 $\mathcal{P}_\theta$에 수렴한다는 것을 의미한다.
하지만, distributions $\mathcal{P}_{\theta_t}$의 수렴이라는 개념은 distribution 간 거리를 계산하는 방법에 의존한다는 사실을 기억하는 것이 필수적이다.
이 거리가 약할수록, $\theta$-space에서 $\mathcal{P}_\theta$-space로의 continuous mapping을 정의하는 것이 쉬워지게 되는데, 이는 distribution이 수렴하기가 쉽기 때문이다.
Mapping $\theta \mapsto \mathcal{P}_\theta$를 continuous가 되도록 신경을 쓰는 주요한 이유는 다음과 같다.
만약 $\rho$가 두 분포 간 우리의 거리 개념이라면, 우리는 continuous loss function $\theta \mapsto \rho(\mathcal{P}_\theta, \mathcal{P}_r)$를 가지고 싶을 것이며, 이는 분포 간 거리인 $\rho$를 사용했을 때 mapping $\theta \mapsto \mathcal{P}_\theta$가 continuous가 되도록 하는 것과 동일하다.
본 논문의 contribution은 다음과 같다.
- Section 2에서는, 분포를 학습하는 관점에서 주로 사용되는 probability distance와 divergence를 비교하여 Earth Mover (EM) distance가 어떻게 작용하는지에 대한 포괄적인 이론적 분석을 제공한다.
- Section 3에서는, EM distance의 효율적이고 합리적인 approximation을 최소화하는 Wasserstein-GAN이라고 불리는 형태의 GAN을 정의하고, 대응되는 최적화 문제가 타당하다는 것을 이론적으로 보인다.
- Section 4에서는, GAN의 주요한 학습 문제를 WGANs이 경험적으로 해결한다는 것을 보인다. 실제로 WGANs을 학습하는 것은 discriminator와 generator 사이의 조심스러운 균형을 유지하는 것이 요구되지 않으며 network architecture의 조심스러운 설계 또한 요구되지 않는다. GANs에서 주로 발생하는 mode dropping phenomenon 또한 매우 줄어든다. WGANs의 가장 주목할만한 실질적 이득은 discriminator를 학습시킴으로써 EM distance를 최적성까지 끊임없이 추정할 수 있는 능력이다. 이러한 학습 curve를 그리는 것은 hyperparameter search와 디버깅에 유용할 뿐만 아니라 관측되는 샘플 품질과 현저하게 상관관계가 있다.
2. Different Distances
우리는 이제 우리의 notation을 도입한다.
$\mathcal{X}$를 compact metric set (이미지 $[0, 1]^d$의 공간과 같은)이라 하고, $\sum$은 $\mathcal{x}$의 모든 Borel subset의 집합을 나타낸다.
(수학적인 용어들이라 내용이 좀 어려운데... 일단 compact라는 용어부터 정리해보겠습니다.
compact라는 의미는 경계가 있고 (bounded) 동시에 경계를 포함 (closed)하는 집합을 의미합니다. 적절한 비유를 하자면, '서울시' 라고 하면 서울시의 시 영토가 있을 것이고, 지도상에서 어떤 경계가 존재하는 것을 생각해보시면 될 것 같습니다.
metric은 distance라는 용어로도 불리는 개념으로, 거리함수가 존재하는 것을 의미합니다. 예를 들면 유클리디안 거리가 여기에 해당합니다.
Borel 집합은 X 내에서 측정 가능한 집합들을 말합니다. 즉, 확률분포로 확률 값이 계산될 수 있는 집합을 의미합니다. 연속함수의 기댓값을 계산하기 위한 수학적인 최소 조건이라고 합니다.)
$Prob(\mathcal{X})$은 $\mathcal{X}$에 정의된 probability measures의 공간을 의미한다. (probability measures는 확률 분포랑 동일한 용어입니다.)
우리는 이제 두 분포 $\mathcal{P}_r, \mathcal{P}_\theta \in Prob(\mathcal{X})$ 사이의 거리와 divergence에 대해서 정의할 수 있다.
- Total Variation (TV) distance

- Kullback-Leibler (KL) divergence

$\mathcal{P}_r$와 $\mathcal{P}_g$는 완전히 연속이라고 가정되며, 그러므로 $\mathcal{X}$에 정의된 동일한 measure $\mu$에 대해서 밀도를 인정한다.
KL divergence는 유명하게 비대칭이며 $P_g(x) =0, P_r(x) > 0$인 point가 존재할 때 무한이다.
- Jensen-Shannon (JS) divergence

$\mathcal{P}_m$은 $(\mathcal{P}_r + \mathcal{P}_g)/2$이다. 이 divergence는 대칭이며 우리가 $\mu = P_m$으로 선택할 수 있기 때문에 항상 정의된다.
- Earth-Mover (EM) distance or Wasserstein-1

$\prod(\mathcal{P}_r, \mathcal{P}_g)$는 주변 확률 분포가 각각 $\mathcal{P}_r$와 $\mathcal{P}_g$인 모든 결합 분포 $\gamma(x, y)$의 집합을 나타낸다.
직관적으로, $\gamma(x, y)$는 분포 $\mathcal{P}_r$를 분포 $\mathcal{P}_g$로 변형시키기 위해서 얼마나 많은 "질량"을 $x$에서 $y$로 운송해야 하는지를 나타낸다. EM distance는 최적 운송 계획의 cost이다.
다음 예시는 확률 분포의 간단한 sequence가 EM distance 하에서는 얼마나 명백하게 수렴하고 다른 distance와 divergence 하에서는 수렴하지 않는지를 나타낸다.
Example 1 (수평선을 학습하는 경우). $Z \sim U[0, 1]$는 unit interval 하에서의 균일 분포이다. $P_0$는 $(0, Z) \in R^2$ (0은 x 축이고 random variable $Z$는 y축)의 분포라고 가정하고, 원점을 통과하는 직선의 수직선이다.
$g_\theta(z) = (\theta, z)$라고 하고 $\theta$는 single real parameter이다.

$\theta_t -> 0$일 때, sequence ($\mathcal{P}_{\theta_t})_{t \in N}$ 는 EM distance 하에서 $\mathcal{P}_0$으로 수렴하지만, JS, KL, reverse KL, TV divergence 하에서는 수렴하지 않는다. Figure 1는 EM과 JS distance의 경우에 대해 이를 나타낸다.

Figure 1을 살펴보면, JS divergence의 경우 대부분의 케이스에서 값이 같으므로, 적절한 gradient 값을 얻기가 어렵습니다. 반면에, EM distance의 경우 대부분의 케이스에서 유의미한 gradient 값을 얻을 수 있게 되죠.
Example 1은 EM distance에 대해서 gradient descent를 진행함으로써 저차원의 manifold에 대한 확률 분포를 학습할 수 있는 케이스를 우리에게 제공한다. 이는 다른 distance나 divergence를 가지고는 될 수 없는데, 이는 resulting loss function이 연속적이지 않기 때문이다.
Wasserstein distance가 JS distance에 비해서 훨씬 약하기 때문에, 가벼운 가정 하에서도 $W(\mathcal{P}_r, \mathcal{P}_\theta)$가 $\theta$에 대한 연속형 loss function인지 아닌지를 물어볼 수 있다. 이는 진실이며, 이제 이를 증명한다.
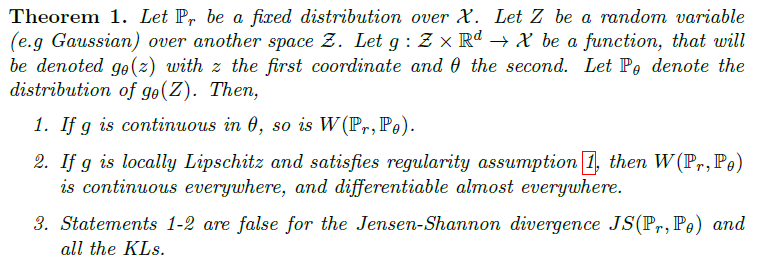
2번에 나와있는 regularity assumption 1도 가져와 보겠습니다.

사실 모든 내용을 정확하게 이해하기란 어렵지만, 일단 제가 이해했던 내용을 조금 설명해보자면...
먼저 Assumption 1.에서 'locally Lipschitz'라고 하는 내용이 있습니다. 이것에 대해서 먼저 알아보겠습니다.
구글에 locally Lipschitz라고 검색하면, 다음 페이지가 검색이 될 텐데요.
en.wikipedia.org/wiki/Lipschitz_continuity
Lipschitz continuity - Wikipedia
From Wikipedia, the free encyclopedia Jump to navigation Jump to search Strong form of uniform continuity For a Lipschitz continuous function, there exists a double cone (white) whose origin can be moved along the graph so that the whole graph always stays
en.wikipedia.org
여기 내용을 보면 다음과 같이 적혀 있습니다.
Intuitively, a Lipschitz continuous function is limited in how fast it can change: there exists a real number such that, for every pair of points on the graph of this function, the absolute value of the slope of the line connecting them is not greater than this real number; the smallest such bound is called the Lipschitz constant of the function.
Lipschitz function이라는 것은 얼마나 빨리 변화할지가 제한된 함수라는 얘깁니다. 2차원에서 생각해보면, 임의의 두 점을 이었을 때 이 직선의 기울기가 바로 변화율이 되죠? 이것이 제한된다는 얘기죠.
그리고 그 bound의 가장 작은 값이 Lipschitz constant라는 것이고요.
즉 어떤 함수가 Lipschitz constant라는 값보다는 항상 변화율이 작아야 한다는 그런 말이 됩니다.
Assumption 1은 이 Lipschitz constant의 기댓값이 무한대보다 작은 경우 g라는 함수가 다음 가정을 만족한다고 적혀있네요.
변화율을 어느 특정 값보다 작게 한다는 것은... 아무래도 Gradient가 과하게 커진다거나 그런 상황을 방지하는 거겠죠?
쓸모 있는 gradient를 얻을 수 있게 한다고 생각하면 될까요... 아무튼 이 정도로 생각해볼 수 있을 것 같습니다.


$z$에 대한 prior $p(z)$에 대해서 이에 대한 distance의 기댓값이 무한대보다 작으면, 아까 얘기했던 locally lipschitz 조건을 만족시키게 되고, Wasserstein distance가 모든 곳에서 연속이고 거의 모든 곳에서 미분 가능하다... 이런 얘기입니다.
이 모든 것들은 EM이 적어도 JS divergence에 비해서 우리 문제에 대해 훨씬 더 민감한 cost function이라는 것을 보인다.
다음 theorem은 이러한 distance와 divergence에 의해서 유도되는 위상의 상대적 강함을 묘사하며, KL이 가장 강력하고, 그다음으로는 JS, TV, EM이 가장 약하다.

이는 KL, JS, TV distance가 저차원의 manifold에 의해서 지지를 받는 분포를 학습할 때 민감한 cost function이 아니라는 사실을 강조한다. 하지만 EM distance는 이러한 환경에서 민감하다.
3. Wasserstein GAN
Theorem 2는 최적화가 이루어질 때 Wasserstein distance가 JS divergence에 비해서 더 좋은 특성을 가진다는 사실을 가리킨다.
하지만, EM distance의 하한 중 가장 큰 값은 매우 계산하기가 어렵다. 반면에, Kantorovich-Rubinstein duality는 다음을 설명한다.

그리고 이 식을 만약 우리가 어떤 $K$에 대해서 $K$-Lipschitz를 만족하는 parameterized family of functions을 가지고 있다면 다음과 같이 변경할 수 있다고 합니다.

그리고 이 문제에 대한 솔루션 $f : \mathcal{X} -> R$을 다음과 같이 구할 수 있다.

이제 equation (2)에 있던 최대화 문제를 해결하는 함수 $f$를 찾는 문제에 도달한다.
이를 대략 근사하기 위해서, 우리가 할 수 있는 것은 compact space $\mathcal{W}$에 놓여있는 가중치 $w$를 파라미터로 가지는 neural network를 학습시키는 것으로, 그러고 나서 $E_{z \sim p(z)} [\triangledown_\theta f_w (g_\theta(z)) ]$을 통해서 backprop을 한다. 이 과정은 일반적인 GAN을 가지고 수행한다.
$\mathcal{W}$이 compact라는 사실은 모든 functions $f_w$가 개별 가중치가 아닌 $\mathcal{W}$에만 의존하는 일부 $K$에 대한 K-Lipschitz일 것이라고 암시하므로 (2)를 관련이 없는 scaling factor와 critic $f_w$의 용량까지 근사한다.
Parameters $w$가 compact space에 놓이도록 하기 위해서(어떤 경계 안에 들어오게 하기 위해서), 우리가 할 수 있는 간단한 어떤 것은 각 gradient update 이후에 가중치들을 fixed box(예를 들어 $\mathcal{W} = [-0.01, 0.01]^l$)에 고정시키는 것이다.
Wasserstein Generative Adversarial Network (WGAN) 절차는 Algorithm 1에 나와있다.
Weight clipping은 Lipschitz constraint를 강제하기 위해서 명백하게 끔찍한 방법이다.
만약 clipping parameter가 크면, 어떤 가중치는 이들의 limit까지 도달하는데 오랜 시간이 걸릴 수 있으며, critic을 최적성까지 학습시키기 어렵게 만든다.
만약 clipping이 작으면, 이는 layer의 수가 적을 때 혹은 batch normalization이 사용되지 않았을 때 vanishing gradient로 이끌기 쉬울 수 있다.
우리는 거의 차이가 없는 간단한 변형을 가지고 실험했으며, 단순성과 이미 좋은 성능을 내는 것 때문에 weight clipping을 고수하기로 했다.
하지만, 우리는 신경망 환경에서 Lipschitz constraints를 강제하는 주제를 추가적인 연구 주제로 남겨둔다.

해당 표가 WGAN의 전체적인 절차를 담고 있습니다. 추후 code review에서 이 내용이 어떻게 코드로 구현되는지도 알아볼 예정입니다.
EM distance가 연속적이고 미분 가능하다는 사실은 우리가 critic을 최적성까지 훈련시킬 수 있다는 사실을 의미한다.
논거는 간단한데, 우리가 더 많이 critic을 학습시킬수록 더 신뢰할 만한 Wasserstein의 gradient를 우리가 얻게 되며, 이는 Wasserstein의 거의 모든 곳에서 미분 가능하다는 사실에 의해 실제로 유용하다.
JS의 경우에, discriminator가 더 나은 gradients을 얻을수록 더 신뢰할 만한 gradient을 얻게 되지만, JS가 locally saturated이기 때문에 true gradient는 0이고 우리가 figure 1과 [1]의 Theorem 2.4에서 볼 수 있듯이 vanishing gradient을 얻게 된다.
Figure 2에서 이 개념의 증명을 볼 수 있으며, 여기서 우리는 GAN discriminator와 WGAN critic을 최적성까지 학습하였다.

Discriminator는 fake와 real 사이를 구별하기 위해서 매우 빠르게 학습하며, 예상되듯이 신뢰할 만한 gradient information을 제공하지 못한다.
하지만 critic은 saturate 되지 않으며 모든 곳에서 현저하게 명백한 gradient를 제공하는 linear function으로 수렴한다.
우리가 가중치를 제한한다는 사실은 공간의 서로 다른 부분에서 함수의 가능한 성장을 최대 선형으로 제한하며, 이는 최적의 critic이 이러한 행동을 하도록 강제한다.
더 중요한 점은, 우리가 critic을 최적성까지 학습할 수 있다는 사실은 우리가 학습할 때 modes가 붕괴되는 것을 불가능하게 만든다.
4. Empirical Results
우리는 Wasserstein-GAN algorithm을 사용하여 image generation에 대해서 실험을 수행하였으며 표준적인 GAN에서 사용되는 formulation에 비해서 이를 사용하는 것에 대한 상당한 실제적 이점이 있음을 보인다.
우리는 두 가지 주요한 이점을 주장한다.
- Generator의 수렴과 샘플 품질과 상관관계가 있는 의미 있는 loss metric
- 최적화 프로세스의 향상된 안정성
4.1 Experimental Procedure
실험은 Image generation에 대해서 수행되었고, 학습하려고 하는 target distribution은 LSUN-Bedrooms dataset을 사용했다. baseline 비교는 DCGAN이 사용되었고, 이는 표준적인 GAN procedure를 사용하여 학습되었다.
생성된 샘플은 64x64 pixel의 3 채널 이미지이며, 실험에 사용된 hyperparameter는 Algorithm 1에서 나타난 그대로 사용하였다.
4.2 Meaningful loss metric
WGAN algorithm은 각 generator update (Algorithm 1에서의 10번째 줄) 이전에 critic $f$를 상대적으로 잘 학습하도록 시도하기 때문에, 이 지점에서의 loss function은 우리가 $f$의 Lipschitz constant를 제약하는 방법과 관련되어 있는 constant factor까지의 EM distance의 추정치이다.
우리의 첫 번째 실험은 얼마나 이 추정치가 생성된 샘플의 품질과 상관관계가 있는지를 나타낸다.
Convolutional DCGAN architecture 외에, generator 혹은 generator와 critic 모두를 4-layer ReLU-MLP with 512 hidden units로 교체하여 실험을 진행하였다.
Figure 3는 모든 3개의 architecture의 WGAN training 동안의 EM distance의 WGAN estimate의 변화를 나타낸다. 이 그림들은 생성된 샘플의 시각적 품질과 이들의 그래프가 상관관계가 있음을 명확하게 보여준다.

대조적으로, Figure 4는 GAN training 동안의 JS distance의 GAN estimate의 변화를 보여준다.
GAN training 동안에, discriminator는 이 값을 최대화하도록 학습된다.

이 양은 명백하게 샘플 품질과 상관관계가 없다. 이는 Figure 4에서 확인할 수 있다.

마지막으로, 높은 learning rate를 사용하거나 critic에 Adam과 같은 momentum based optimizer를 사용할 때 WGAN 학습이 불안정해질 수 있다.
Critic에 사용되는 loss가 nonstationary 이므로, momentum 기반의 방법론들은 더 안 좋게 perform 하는 것으로 보인다.
우리는 momentum이 잠재적인 원인이라고 파악하였는데, 이는 loss가 상승하고 샘플이 악화될 때 Adam step과 gradient 간의 cosine 값이 일반적으로 마이너스로 변하기 때문이다.
이 cosine 값이 마이너스인 유일한 곳은 이러한 불안정한 상황들이었다.
그러므로 우리는 nonstationary problem에서도 잘 작동하는 것으로 알려져 있는 RMSProp을 사용하였다.
4.3 Improved stability
WGAN의 이점 중 하나는 critic을 최적성까지 학습하도록 해준다는 것이다.
critic이 완전히 학습되었을 때, 이는 다른 신경망인 generator가 학습될 수 있도록 하는 loss를 제공한다.
이는 우리가 더 이상 generator와 discriminator의 capacity를 적절하게 균형 맞출 필요가 없다는 것을 의미한다.
critic이 더 잘할수록, generator이 학습하는 데 사용되는 더 높은 gradient를 제공한다.
우리는 generator에 사용되는 구조를 변화시켰을 때 GAN보다도 WGAN이 더 강건하다는 것을 확인했다.
우리는 이를 3개의 generator 구조를 실험해서 확인하였다.
(1) convolutional DCGAN generator / (2) convolutional DCGAN generator without batch normalization with 512 hidden units / (3) 4-layer ReLU-MLP with 512 hidden units.
마지막 두 개는 GAN을 이용했을 때 매우 안 좋은 성능을 내는 것으로 알려져 있다.
우리는 WGAN critic이나 GAN discriminator로 convolutional DCGAN 구조를 사용했다.
Figure 5, 6, 7는 3가지 구조를 이용해서 WGAN과 GAN을 사용하였을 때 생성된 샘플을 보여준다.



5. Related works
생략
6. Conclusion
우리는 전통적인 GAN training을 대체하는 WGAN이라는 알고리즘을 도입했다.
새로운 모델에서, 학습의 안정성이 향상될 수 있고 mode collapse와 같은 문제들이 제거되며, debugging이나 hyperparameter search에 유용한 유의미한 학습 곡선을 제공한다는 것을 보였다.
추가로, 우리는 최적화 문제가 건전함을 보였으며, 분포 간의 다른 거리와의 깊은 연관성을 강조하는 광범위한 이론적인 논의도 제공되었다.
수학적인 내용이 많이 들어가 있는 논문이라, 완벽하게 이해하는 것이 불가능했습니다.
모델을 이용하는 입장에서 기억해야 할 점이라고 한다면, 먼저 loss가 이미지의 품질과 상관관계를 가지고 있기 때문에 loss 값을 보고서 학습이 잘 진행되고 있는지 파악하기가 쉽다는 점이 있을 것 같습니다.
논문의 그림에서 나온 대로, 점점 loss가 줄어들고 이에 따라서 이미지의 품질이 좋아지는 것을 확인하면 학습이 잘 이루어지고 있다는 것을 파악할 수 있겠죠.
그리고 기존 GAN의 경우 Generator와 Discriminator가 서로 균형을 이루면서 학습이 진행되어야만 하지만, WGAN의 경우는 critic을 최대한으로 최적 상태까지 학습시키는 것을 통해서 generator에게 더 좋은 gradient를 제공한다는 점에서 학습의 메커니즘 차이가 있다 정도를 기억해두면 좋을 것 같습니다.
WGAN는 여기까지 정리하겠습니다.